Comprehensive TM ROS Repositories for Seamless Integration
Flexible
Precise
Efficient
To facilitate seamless integration with ROS, Techman Robot offers a comprehensive suite of TM ROS Repositories tailored to various TMflow and ROS versions. These repositories equip developers with the necessary tools to build ROS-based applications with TM AI cobot, enabling precise motion control and efficient data acquisition. Whenever you are working with different ROS versions or specific TMflow configurations, these repositories offer the flexibility and resources needed to create robust and intelligent robotic solutions.
Product Overview
Techman Robot offers a comprehensive suite of TM ROS Repositories available on GitHub. These repositories are carefully organized to correspond with different TMflow and ROS versions, ensuring compatibility and ease of use for developers.
For your convenience, please refer to the following table for a detailed breakdown of the available repositories:
tmr_ros1
ROS version supported
- ROS Melodic Morenia
- ROS Noetic Ninjemys
TMflow version supported
- TMflow 1.76 ~ 1.88
tmr_ros2
ROS version supported
- ROS 2 Dashing Diademata
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
TMflow version supported
- TMflow 1.76 ~ 1.88
tmr2_ros1
ROS version supported
- ROS Noetic Ninjemys
TMflow version supported
- TMflow 2.14 or above
tmr2_ros2
ROS version supported
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
TMflow version supported
- TMflow 2.14 or above
Each repository usually contains the following items:
TM ROS Driver
An interface that enables a ROS Node to acquire data from the robot and control its motion seamlessly.
Message Files (msgs)
Essential files required for interacting with the TM ROS Driver
Sample Codes
A collection of example codes designed to help developers quickly understand and implement the TM ROS Driver`s features in their projects.
3D Models(1)
A comprehensive set of 3D models for TM robots, including meshes, URDF and Xacro files, which are necessary for visualization and simulation.
Simulation-related Files(2)
Files that enable TM AI Cobot to function within ROS simulators such as Gazebo and Moveit, allowing for realistic testing and development in a virtual environment.
TM ROS Driver
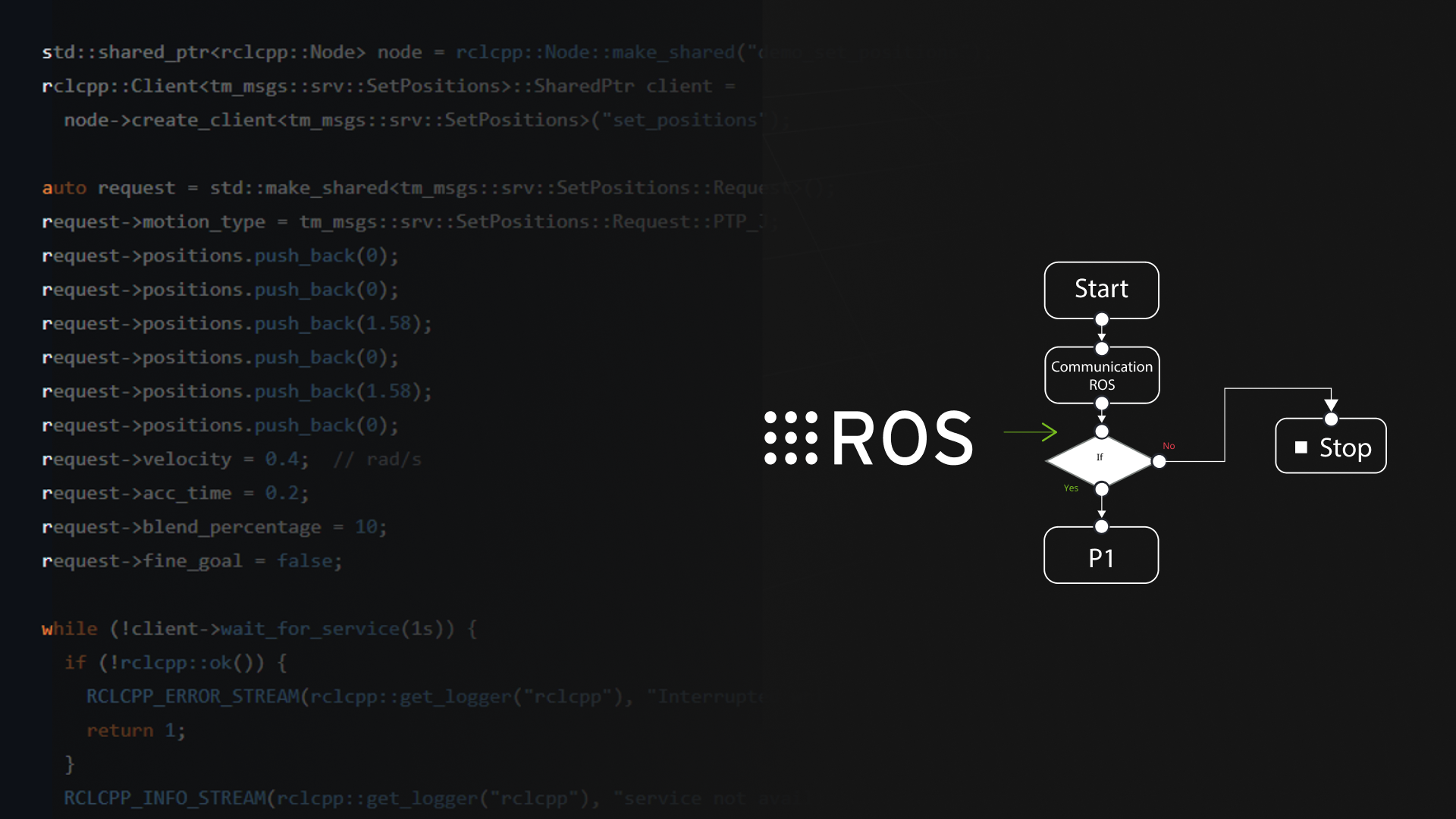
TM ROS Driver is an interface program with three key components: Topic Publisher, Service Server, and Action Server, each serving a vital role in facilitating communication and control between developers` ROS nodes and the robot.
01
Topic Publisher
The Topic Publisher connects with TMflow through Ethernet slave, collects data from the robot (robot status, joint status, tool pose, IOs, etc.), and publishes the data as ROS Topics. Developers (ROS Node) can subscribe to these ROS Topics and make use of the data.
- publish feedback state on /feedback_states, which includes robot position, error code, and IO status, etc.
- publish joint states on /joint_states
- publish tool pose on /tool_pose
02
Service Server
Developers’ ROS Node can send requests to these ROS Services to control the robot.(3)
- /tm_driver/send_script (see tm_msgs/srv/SendScript.srv) : send robot script (TM Robot Expression) to Listen node
- /tm_driver/set_event (see tm_msgs/srv/SetEvent.srv) : send “Stop”, “Pause” or “Resume” command to Listen node
- /tm_driver/set_io (see tm_msgs/srv/SetIO.srv) : send digital or analog output value to Listen node
- /tm_driver/set_position (see tm_msgs/srv/SetPosition.srv) : send motion command to Listen node, the motion type include PTP, LINE, CIRC ans PLINE, the position value i
03
Action Server
Action Server acts as an action interface that translates trajectories generated by MoveIt and drives robot motion.
- An action interface on /follow_joint_trajectory for seamless integration with MoveIt
Please Note:
- Not all robot models are supported on every Repository, which are under development and would be uploaded occasionally. Please refer to what is published on Techman Robot's GitHub Page as the primary source. If you have any questions or needs, please contact us.
- Not all TM ROS Repositories provide the Simulation-related files, which are under development and would be uploaded occasionally. Please refer to what is published on Techman Robot's GitHub Page as the primary source. If you have any questions or needs, please contact us.
- For motion control by ROS, it requires running a project that activates the Listen Server (for, with Listen Node).
Learn More
111