
提供全面資源,實現與 TM 協作機器人的無縫整合
彈性
精準
高效
為協助用戶與 ROS 無縫整合,達明機器人提供了一套全方位的 TM ROS 資源庫,專為各種 TMflow 與 ROS 版本量身打造。這些資源庫為開發者提供了必要的工具,以便利用 TM AI 協作機器人建構基於 ROS 的應用程式,實現精準的運動控制與高效的數據擷取。無論您使用的是不同的 ROS 版本或特定的 TMflow 配置,這些資源庫都能提供所需的彈性與資源,協助您打造穩健且智慧的機器人解決方案。
產品概述
達明機器人於 GitHub 上提供完整的 TM ROS 資源庫。這些資源庫經過精心整理,對應不同的 TMflow 與 ROS 版本,確保開發者的相容性與易用性。
為方便您使用,請參考下表以獲取可用資源庫的詳細分類:
tmr_ros1
支援的 ROS 版本
- ROS Melodic Morenia
- ROS Noetic Ninjemys
支援的 TMflow 版本
- TMflow 1.76 ~ 1.88
tmr_ros2
支援的 ROS 版本
- ROS 2 Dashing Diademata
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
支援的 TMflow 版本
- TMflow 1.76 ~ 1.88
tmr2_ros1
支援的 ROS 版本
- ROS Noetic Ninjemys
支援的 TMflow 版本
- TMflow 2.14 或以上
tmr2_ros2
支援的 ROS 版本
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
支援的 TMflow 版本
- TMflow 2.14 或以上
每個資源庫通常包含以下項目:
TM ROS Driver
一個介面程式,讓 ROS 節點 (Node) 能從機器人獲取數據並無縫控制其運動。
Message Files (msgs)
與 TM ROS Driver 互動所需的重要檔案。
範例程式碼
一系列範例程式碼,旨在協助開發者快速理解並在專案中實作 TM ROS Driver 的功能。
3D 模型(1)
TM AI 協作機器人的完整 3D 模型集,包含網格 (meshes)、URDF 和 Xacro 檔案,為視覺化與模擬所必需。
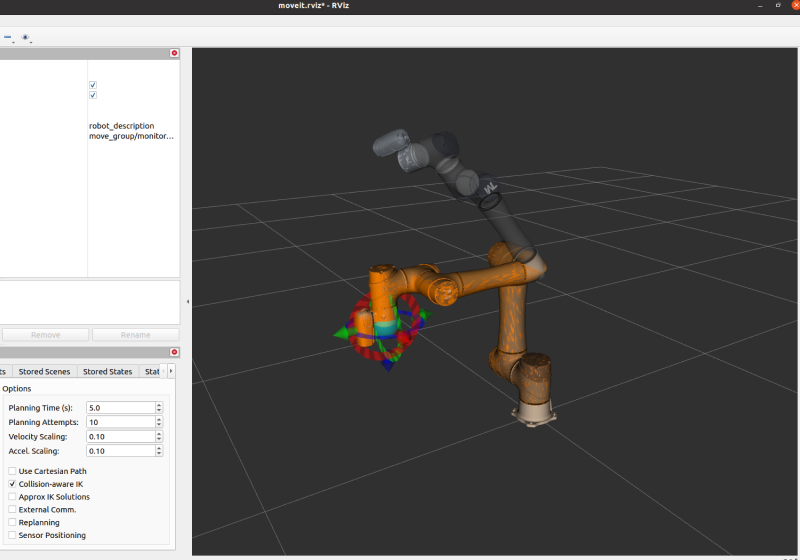
模擬相關檔案(2)
讓 TM AI 協作機器人能在 Gazebo 和 MoveIt 等 ROS 模擬器中運作的檔案,支援在虛擬環境中進行擬真的測試與開發。
TM ROS Driver
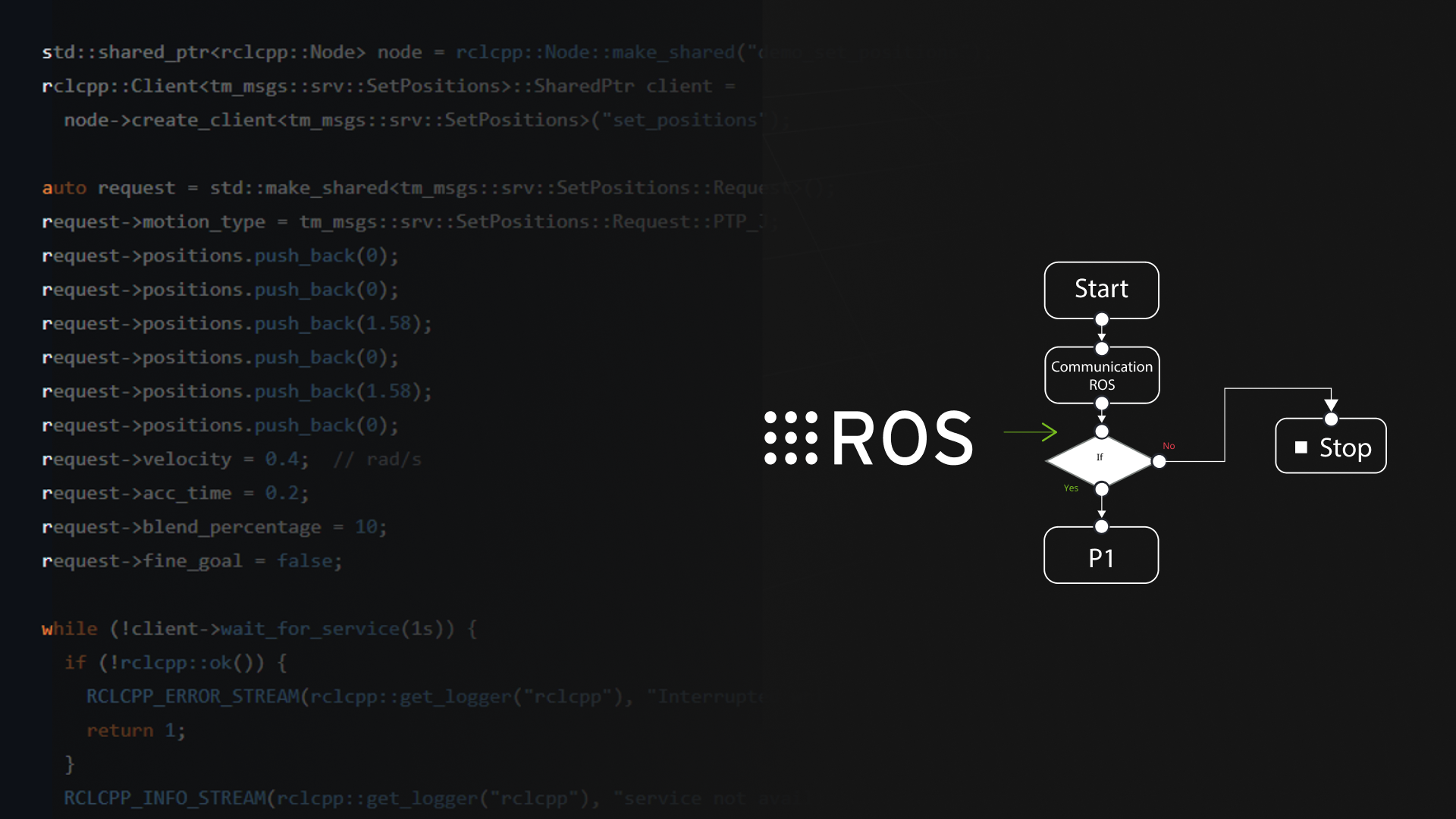
TM ROS Driver 是一個介面程式,包含三個關鍵組件:Topic Publisher、Service Server 和 Action Server,各自在促進開發者的 ROS 節點與機器人之間的通訊和控制方面扮演重要角色。
01
Topic Publisher
Topic Publisher 透過 Ethernet Slave 與 TMflow 連線,從機器人收集數據(機器人狀態、關節狀態、工具姿態、IO 等),並將數據發布為 ROS Topics。開發者(ROS 節點)可以訂閱這些 ROS Topics 並利用這些數據。
- 於 /feedback_states 發布回饋狀態 回饋狀態包括:手臂位置、錯誤碼、IO 狀態、等等(見 tm_msgs/msg/FeedbackState.msg)
- 於 /joint_states 發布關節狀態
- 於 /tool_pose 發布末端工具位置
02
Service Server
發者的 ROS 節點可以發送請求至這些 ROS Services 以控制機器人。(3)
- /tm_driver/send_script (見 tm_msgs/srv/SendScript.srv): 對 Listen node 發送 robot script,《Expression Editor and Listen Node》。
- /tm_driver/set_event (見 tm_msgs/srv/SetEvent.srv): 對 Listen node 發送 Stop、Pause 或 Resume 指令
- /tm_driver/set_io(見 tm_msgs/srv/SetIO.srv): 對 Listen node 發送數位或類比輸出值的指令
- /tm_driver/set_position(見 tm_msgs/srv/SetPosition.srv): 對 Listen node 發送運動指令,句括 PTP、LINE、CIRC 和 PLINE,詳情請看說明書《Expression Editor and Listen Node》。
03
Action Server
Action Server 作為動作介面,負責轉換由 MoveIt 產生的軌跡並驅動機器人運動。
- 位於 /follow_joint_trajectory 的動作介面,用於與 MoveIt 無縫整合。
備註:
- 並非所有資源庫皆支援所有機器人型號,部分功能仍在開發中並將不定期上傳。請以達明機器人 GitHub 頁面上發布的內容為主要依據。如有任何疑問或需求,請聯繫我們。
- 並非所有 TM ROS 資源庫皆提供模擬相關檔案,部分功能仍在開發中並將不定期上傳。請以達明機器人 GitHub 頁面上發布的內容為主要依據。如有任何疑問或需求,請聯繫我們。
- 若要透過 ROS 進行運動控制,需要執行一個啟動 Listen Server 的專案(針對 Listen 節點)。