適用於各種情境的操作模式
TMflow重新定義了機器人運作的靈活性,提供多樣的操作模式,以適應任何情況。
本地操作
使用在手臂控制器上運行的 TMflow可直接管理您的機器人,能立即的操控並作調整,適合用於在現場的工作任務。
遠端操作
體驗遠程控制機器人的便利,只需在您的電腦上運行TMflow,就能輕鬆的遠程操作手臂。
離線操作
在您的電腦上使用TMflow模擬來控制虛擬機器人,可以在不需要實體的手臂下進行編輯,非常適合設計複雜專案或培訓目的。
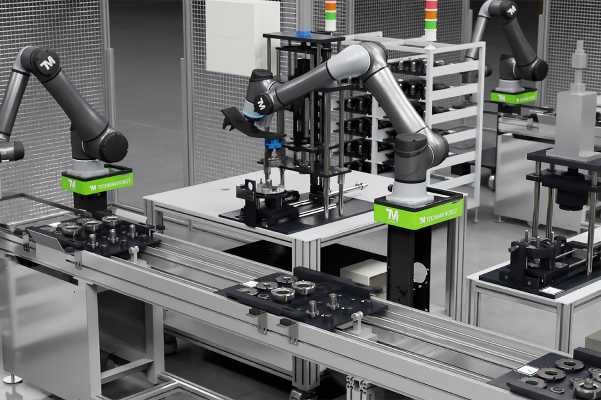
適用於各種應用的功能模組
利用TMflow的人工智慧視覺節點設計手臂應用,如視覺檢測。
視覺控制
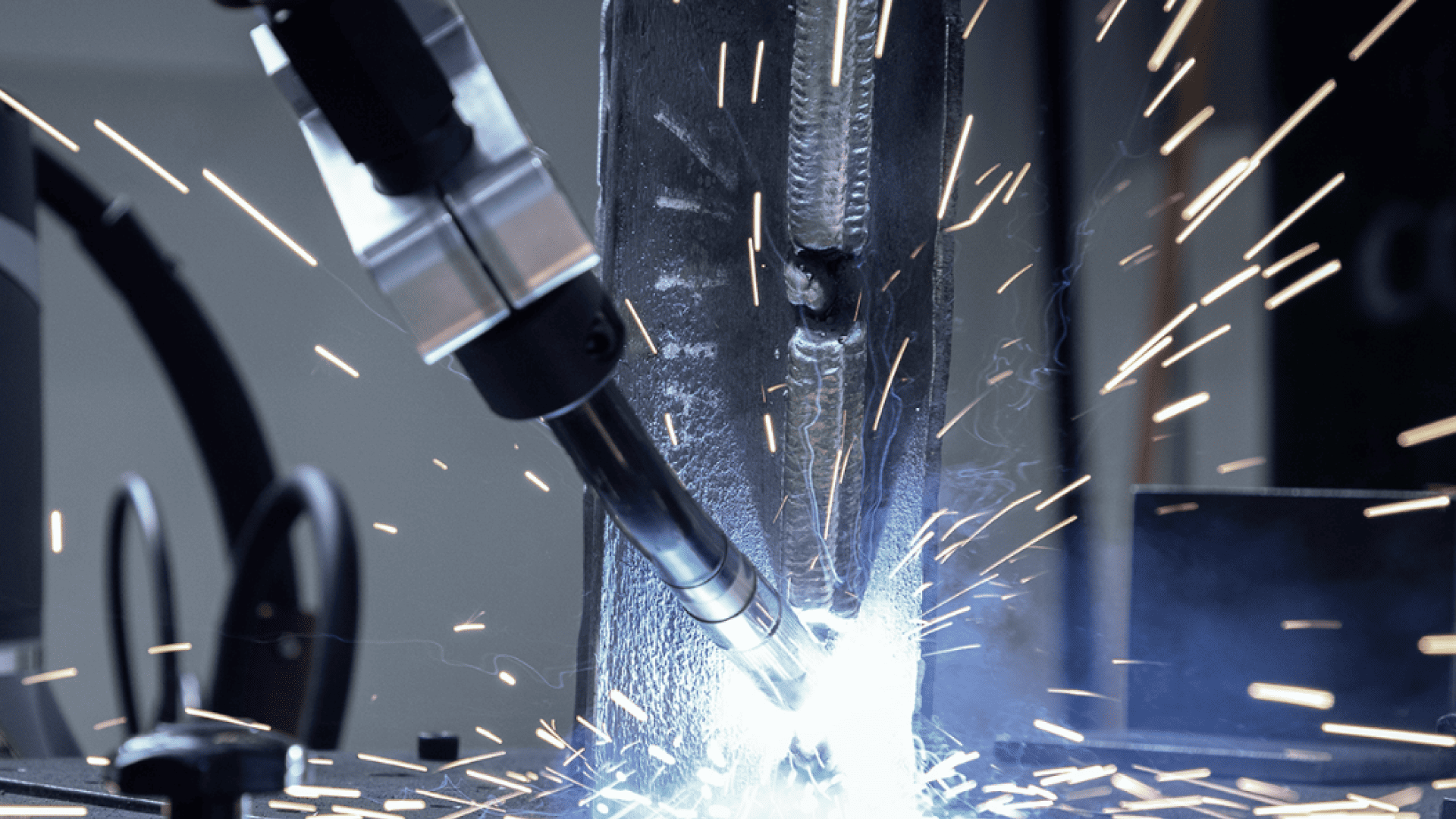
01力量控制
02更多功能…
03主要亮點
TM ROS Repositories
將 TM AI 協作機器人無縫整合至您的 ROS 環境,協助開發者建構基於 ROS 的應用程式,實現進階控制、數據採集及即時系統整合,為自動化專案帶來更高的靈活性與客製化潛力。
TMcraft
輕鬆實現客製化整合,TMcraft 讓開發者能運用 C# 與 WPF 打造專屬解決方案,簡化 TMflow 與第三方設備、機台及系統的串接。在 TMflow 生態系內,設計出完全符合您工廠需求的客製化自動化工作流程。
EIH Camera API
完全掌控協作機器人相機的全部潛能,EIH Camera API 允許開發者自由調整參數與擷取影像資料,無縫導入客製化視覺演算法,打造適用於精密自動化的高效能進階視覺系統。