

AMMR 複製解決方案
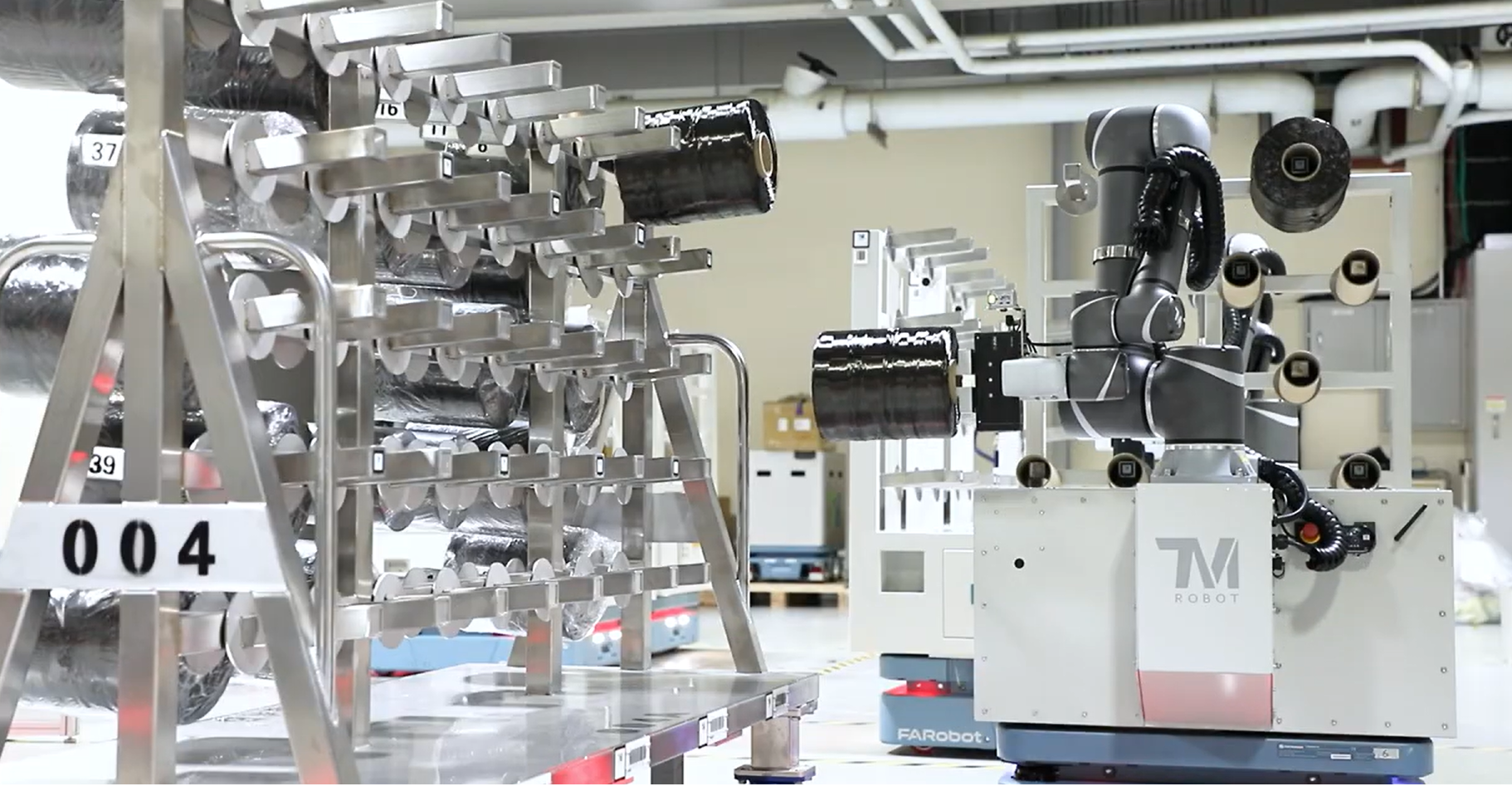
AMMR(自主移動操作機器人)常面臨多台機器人執行相同任務的情況。透過 AMMR 複製解決方案,您可以快速無痛地將機器人專案複製到其他機器人,跳過手動調整的繁瑣過程,實現所有機器人的一致效能並提升整體生產力。
從手動調整到快速部署
在生產線自動化中,部署多台機器人既耗時又費工。為確保所有機器人的移動點位完全一致,必須逐一調整每台機器人。
過去
在生產線自動化中,部署多台機器人既耗時又費工。為確保所有機器人的移動點位完全一致,必須逐一調整每台機器人。
現在
專案複製後,機器人僅需執行指定的自動校正流程,即可達成完全相同的移動路徑,將多台機器人間的點位誤差降至最低。
機器人複製的問題與解決方案
鎖定機器人底座的人為誤差
機器人安裝於底座時存在組裝誤差,導致不同機器人的座標參考點不一致。 解決方案: 導入視覺座標定位,利用視覺補償機器人座標參考點的差異。
末端工具製造與安裝誤差
工具製造過程有公差,安裝於法蘭面時亦有組裝誤差。 解決方案: 導入自動視覺 TCP 校正,以獲取工具末端點的精確位置。
在數分鐘內複製新的機器人程式
點位
原始機器人在視覺座標系中寫入點位。
快速擴充您的協作機器人陣容
透過 AMMR 複製方案簡化部署流程,僅需搭配 TM TCP 校正套件,即可精準且迅速地複製工站。
