当社のロボティクスプラットフォームにおける3つの主要開発領域を探索



ロボット上でのプログラミング
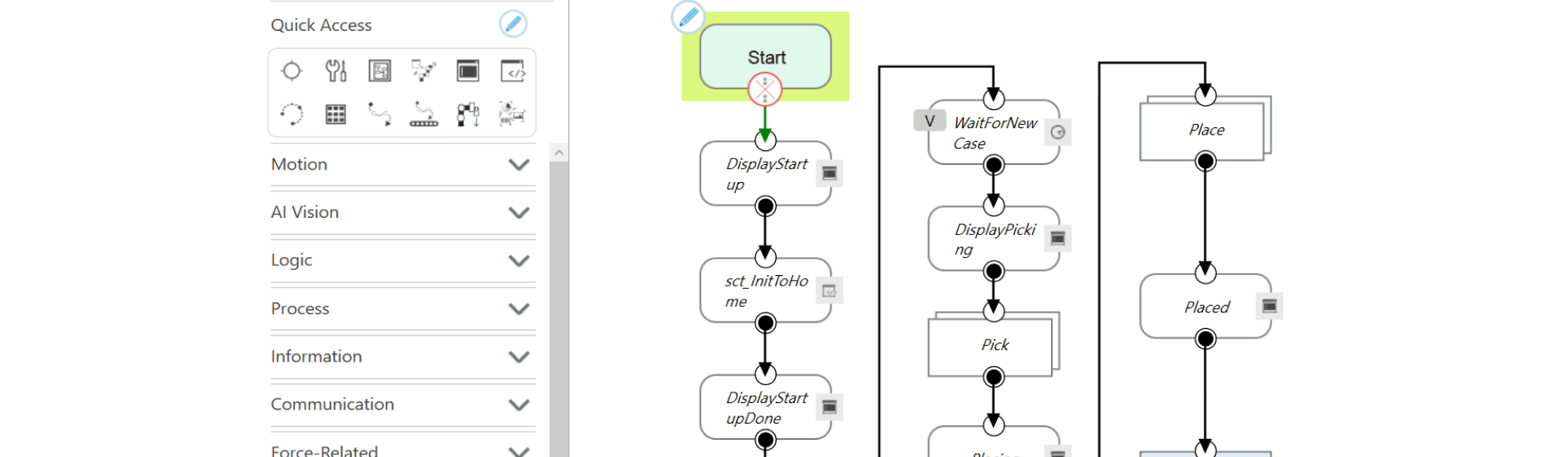
誰でも使えるビジュアルプログラミング
直感的な TMflow ソフトウェアを使用する際、「フロープロジェクト (Flow Project)」を選択して視覚的にアプリケーションを作成できます。この方法はブロック図と「ドラッグ&ドロップ、開発」のアプローチを採用しており、ロボット工学の初心者にも最適です。
詳細については、TMflowソフトウェアマニュアルをご参照ください。
リモート制御と統合
リッスンサーバー:リモートモーション制御
Listen Serverを使用すると、TMscriptを介してロボットの動作をリモート制御できます。フロープロジェクトのListenノード、またはスクリプトプロジェクトで ScriptListen() 関数を実行することでアクティブ化できます。詳細なガイダンスは、TMscriptプログラミング言語マニュアルに記載されています。
データ収集とシステム構成
TMflowは、Modbus、Ethernet、およびオプションのProfinetやEthernet-IPなどのプロトコルを備えた複数のサーバーを統合し、シームレスなデータ収集とシステム構成を可能にします。これにより、さまざまな産業環境での柔軟かつ堅牢な統合が保証されます。主な機能は以下の通りです: • ロボットの状態と位置の確認(TCP、ジョイントデータ、IO、安全IO) • プロジェクトの速度と実行時間の管理 • システムデータへのアクセスと構成
TM ROSリポジトリ:シームレスなROS統合
ROS開発者向けに、TM ROSリポジトリはTM AIコボットをROSプロジェクトに統合するために必要なすべてを提供します。以下のツールにアクセスできます: • TM ROS Driver • 各種ロボットモデルタイプの3Dモデル • GazeboおよびMoveit用のLaunchファイル TM ROS Driverを使用すると、開発者はROSを介してロボットの動作を制御しデータにアクセスできるため、ROSエコシステム内でのタスクの効率的なシミュレーション、計画、実行が可能になります。
EIHカメラAPI:カスタムビジョンソリューション
EIH Camera API を活用して、独自のビジョンアルゴリズムをTM AIコボットのEye-In-Handカメラと統合できます。生画像データへのアクセス、設定の取得と変更、特定のニーズに合わせたカメラ制御が可能です。
カスタムプラグインと拡張性
適切なツールとプラットフォームを提供することで、サードパーティの開発者は新鮮な視点やアイデアを画期的なソリューションに変えることができます。これらの貢献は、TMflowの機能を強化するだけでなく、全体的なユーザーエクスペリエンスを大幅に豊かにします。カスタムプラグインは、特に以下の主要なシナリオで価値を発揮します:
デバイス操作
グリッパー、アクチュエータ、その他の周辺機器など、ロボット上のサードパーティ製デバイスをシームレスに統合および制御するエンジニアを支援します。
アプリケーションセットアップウィザード
直感的なステップバイステップの設定を通じてエンジニアをガイドし、溶接やパレタイジングなどの複雑なアプリケーション構築プロセスを合理化します。
カスタムダッシュボード
アプリケーションに固有の洞察と監視を提供する調整されたディスプレイを作成し、運用効率と監視機能を強化します。
TMコンポーネント:シンプルなカスタマイズ
TMコンポーネント を使用して、フロープロジェクト内にカスタムノードを作成します。TM Component Editorを使用すると、ノード、変数、構成を効率的でテストしやすいコンポーネントにパッケージ化できます。
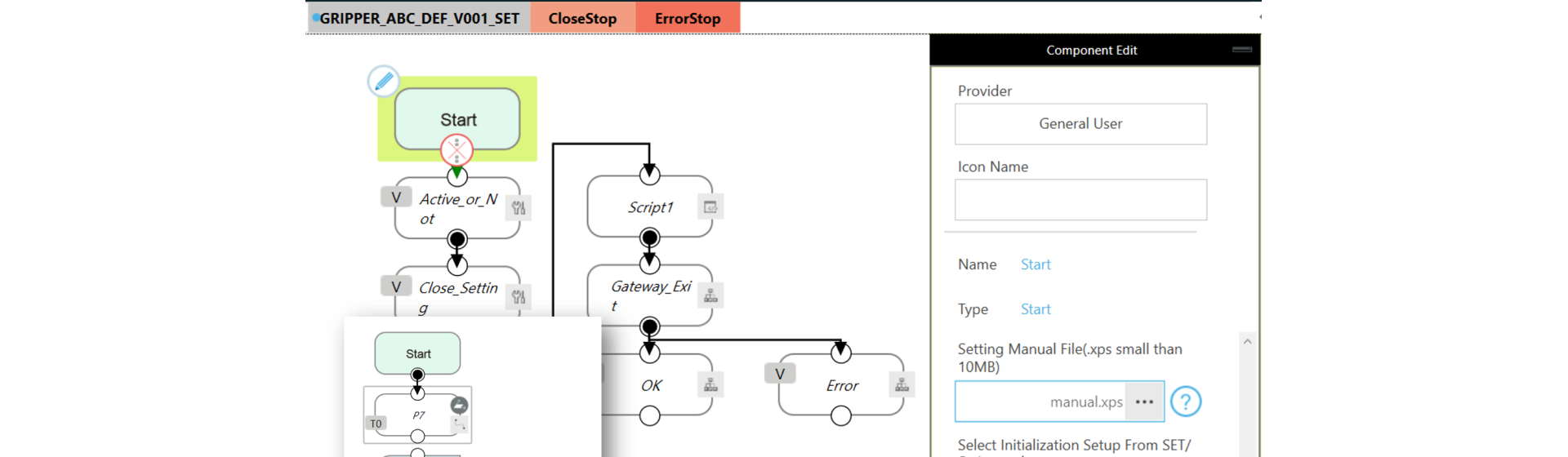
TMflowでのTMコンポーネント作成方法を学ぶ TMコンポーネントエディタマニュアル .
TMcraftプラグイン:高度なカスタマイズ
TMcraft を使用すると、開発者はTMflowに直接組み込まれる洗練されたプラグインを構築できます。C#とWPFを利用して高度にカスタマイズされたインターフェースを作成し、コミュニティリソースを活用して開発体験を充実させることができます。
TMcraft APIドキュメントで始めましょう こちらから。 .
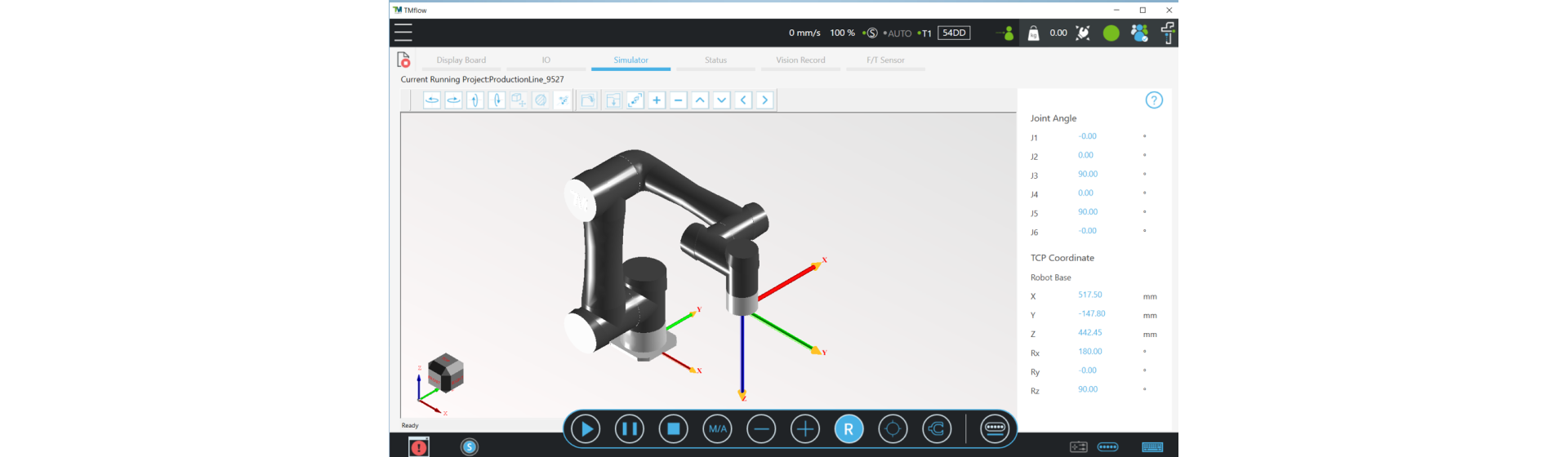
TMflowシミュレータ:導入前のテスト
TMflowシミュレータ は、仮想環境でプロジェクトのプロトタイプ作成、テスト、改良を行える強力なツールです。これにより、コストを削減し、リスクを軽減し、ソリューションが実際の環境で最適に機能することを保証します。
TMflowシミュレータガイドでシミュレーションを始めましょう こちらから。 .