
シームレスな統合のための包括的なTM ROSリポジトリ
柔軟性
正確性
効率性
ROSとのシームレスな統合を促進するために、Techman Robotは、さまざまなTMflowおよびROSバージョンに対応した包括的なTM ROSリポジトリスイートを提供しています。これらのリポジトリは、TM AI Cobotを使用したROSベースのアプリケーションを構築するために必要なツールを開発者に提供し、正確なモーション制御と効率的なデータ取得を可能にします。異なるROSバージョンや特定のTMflow構成で作業する場合でも、これらのリポジトリは、堅牢でインテリジェントなロボットソリューションを作成するために必要な柔軟性とリソースを提供します。
製品概要
Techman Robotは、GitHub上で利用可能な包括的なTM ROSリポジトリスイートを提供しています。これらのリポジトリは、異なるTMflowおよびROSバージョンに対応するように慎重に整理されており、開発者にとっての互換性と使いやすさを保証します。
詳細については、以下の表で利用可能なリポジトリの内訳をご確認ください。
tmr_ros1
対応ROSバージョン
- ROS Melodic Morenia
- ROS Noetic Ninjemys
対応TMflowバージョン
- TMflow 1.76 ~ 1.88
tmr_ros2
対応ROSバージョン
- ROS 2 Dashing Diademata
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
対応TMflowバージョン
- TMflow 1.76 ~ 1.88
tmr2_ros1
対応ROSバージョン
- ROS Noetic Ninjemys
対応TMflowバージョン
- TMflow 2.14またはそれ以降
tmr2_ros2
対応ROSバージョン
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
対応TMflowバージョン
- TMflow 2.14またはそれ以降
各リポジトリには通常、以下の項目が含まれています:
TM ROS Driver
ROSノードがロボットからデータを取得し、モーションをシームレスに制御できるようにするインターフェース。
Message Files (msgs)
TM ROS Driverとの対話に必要な必須ファイル。
Sample Codes
開発者がプロジェクト内でTM ROS Driverの機能を迅速に理解し実装できるように設計されたサンプルコード集。
3D Models(1)
可視化やシミュレーションに必要な、メッシュ、URDF、Xacroファイルを含むTMロボット用3Dモデルの包括的なセット。
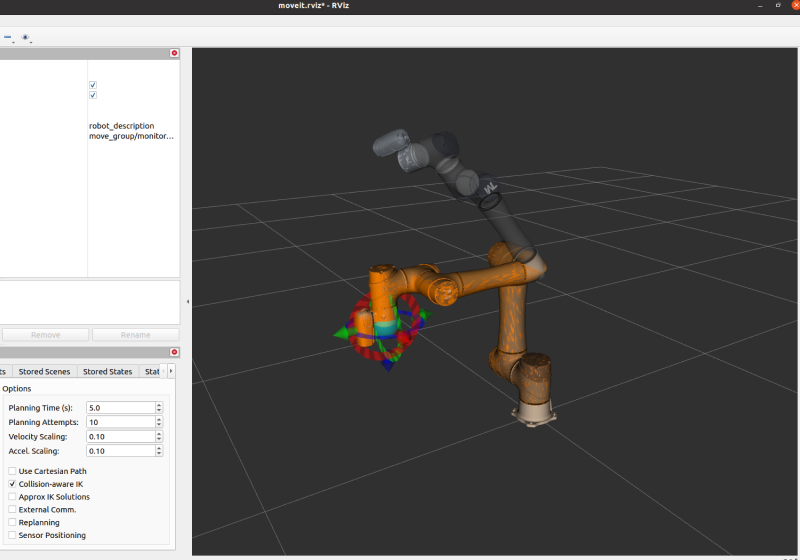
Simulation-related Files(2)
TM AI CobotがGazeboやMoveItなどのROSシミュレータ内で機能することを可能にし、仮想環境でのリアルなテストと開発を実現するファイル。
TM ROSドライバー
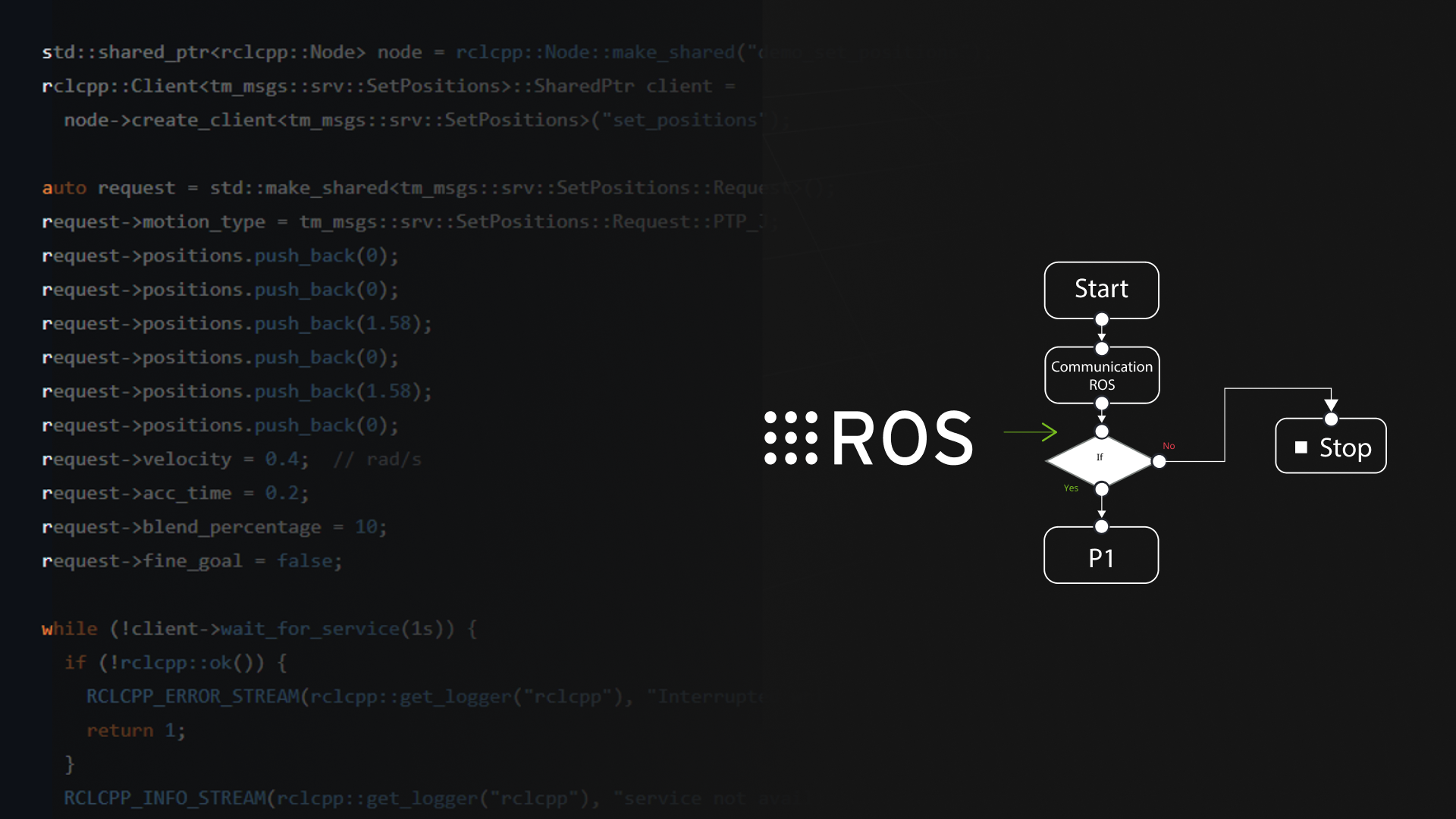
TM ROS Driverは、トピックパブリッシャ (Topic Publisher)、サービスサーバ (Service Server)、アクションサーバ (Action Server) の3つの主要コンポーネントを持つインターフェースプログラムであり、それぞれが開発者のROSノードとロボット間の通信と制御を促進する上で重要な役割を果たします。
01
Topic Publisher
Topic Publisherは、Ethernetスレーブを介してTMflowと接続し、ロボットからデータ(ロボットステータス、ジョイントステータス、ツールポーズ、IOなど)を収集し、ROSトピックとしてデータをパブリッシュ(送信)します。開発者(ROSノード)は、これらのROSトピックをサブスクライブ(受信)してデータを利用できます。
- /feedback_states でフィードバック状態(ロボット位置、エラーコード、IOステータスなど)をパブリッシュ
- /joint_states でジョイントステータスをパブリッシュ
- /tool_pose でツールポーズをパブリッシュ
02
Service Server
開発者のROSノードは、これらのROSサービスにリクエストを送信してロボットを制御できます。(3)
- /tm_driver/send_script (参照 tm_msgs/srv/SendScript.srv): ロボットスクリプト (TM Robot Expression) をListenノードに送信
- /tm_driver/set_event (参照 tm_msgs/srv/SetEvent.srv): 「Stop」、「Pause」、「Resume」コマンドをListenノードに送信
- /tm_driver/set_io (参照 tm_msgs/srv/SetIO.srv): デジタルまたはアナログ出力値をListenノードに送信
- /tm_driver/set_position (参照 tm_msgs/srv/SetPosition.srv): モーションコマンドをListenノードに送信。モーションタイプにはPTP、LINE、CIRC、PLINEが含まれ、位置値はジョイント角度(J)またはツールポーズ(T)です。詳細はマニュアル「Expression Editor and Listen Node」を参照してください。
03
Action Server
Action Serverは、MoveItによって生成された軌道を変換し、ロボットの動作を駆動するアクションインターフェースとして機能します。
- MoveItとのシームレスな統合のための /follow_joint_trajectory 上のアクションインターフェース。
ご注意:
- すべてのロボットモデルがすべてのリポジトリでサポートされているわけではありません。開発中のものは順次アップロードされます。主要な情報源としてTechman RobotのGitHubページで公開されている内容を参照してください。ご質問やご要望がございましたら、お問い合わせください。
- すべてのTM ROSリポジトリがシミュレーション関連ファイルを提供しているわけではありません。開発中のものは順次アップロードされます。主要な情報源としてTechman RobotのGitHubページで公開されている内容を参照してください。ご質問やご要望がございましたら、お問い合わせください。
- ROSによるモーション制御を行うには、Listen Serverを有効にするプロジェクトを実行する必要があります(Listen Nodeを使用)。