

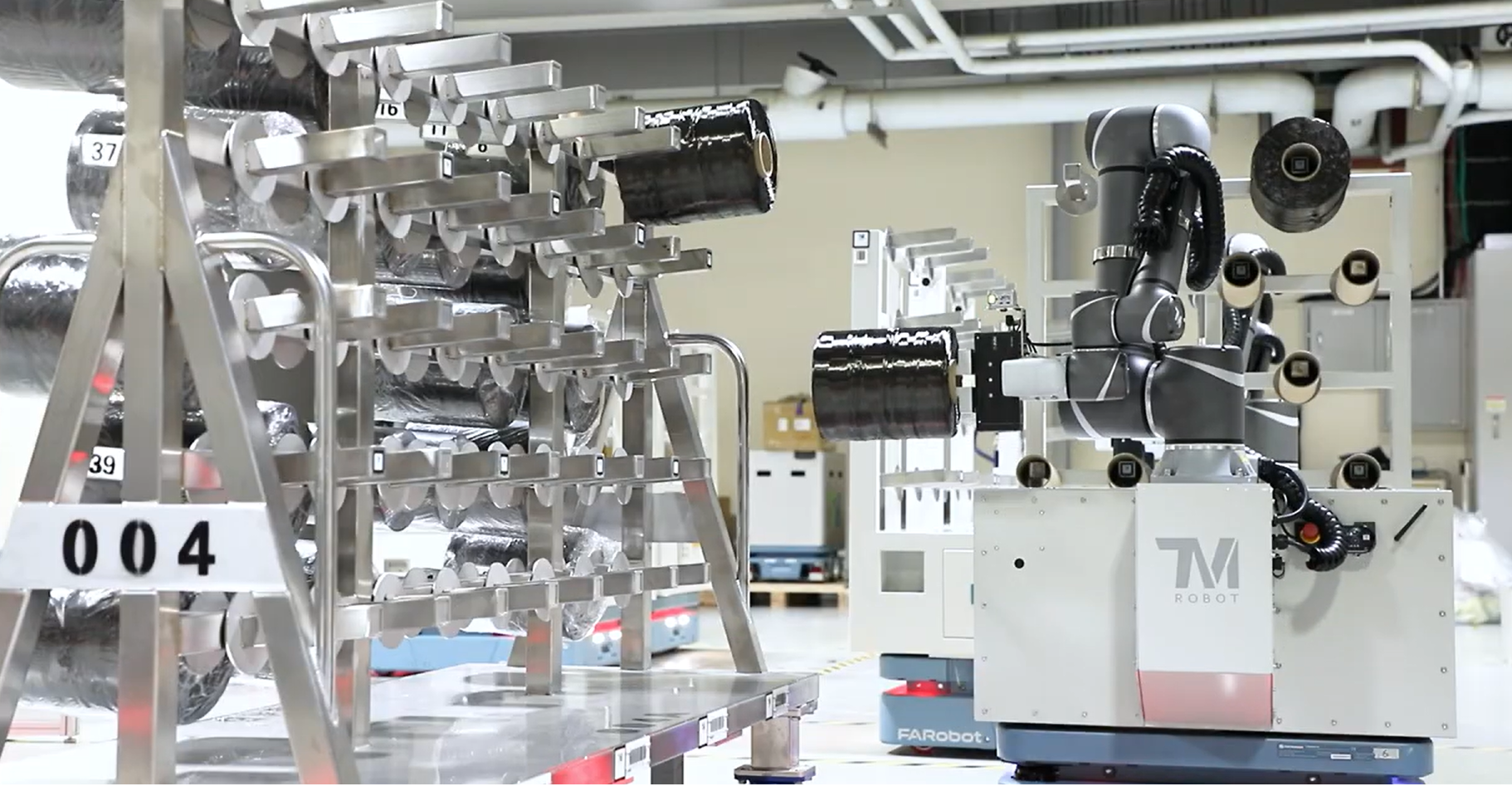
AMMRクローニングソリューション
AMMR(自律移動マニピュレーションロボット)は、複数のロボットが同じタスクを実行する場面によく直面します。AMMRクローニングソリューションを使用すると、ロボットプロジェクトを他のロボットに迅速かつ簡単に複製でき、各ロボットを手動調整する時間を省略できます。すべてのロボットで一貫したパフォーマンスを実現し、全体的な生産性を向上させます。
手動調整から迅速な展開へ
位置の手動調整不要でクローンプロセスを簡素化 — 人件費を削減し、セットアップ効率を向上させます
これまで
生産ラインの自動化において、複数のロボット配備は時間と労力がかかります。すべてのロボットの動作点を完全に一致させるには、各ロボットを手動で個別に調整する必要がありました。
これから
プロジェクトをクローンした後、ロボットは指定された自動キャリブレーションプロセスを経るだけで、まったく同じ動作パスを実現し、複数ロボット間の動作点誤差を最小限に抑えます。
ロボットクローニングの問題と解決策
ロボットベース固定時の人為的ミス
ベースへの取り付け誤差により、座標基準点が一致しない。 解決策: ビジュアル座標位置決めを導入し、ビジョンを使用して座標基準点の差を補正する。
エンドオブアームツールの製造および設置誤差
ツールの製造公差やフランジへの取り付け誤差。 解決策: 自動ビジュアルTCP補正を導入し、ツール先端の位置を取得する。
数分で新しいロボットプログラムを複製
ポイント
元のロボットがビジュアル座標系でポイントを書き込みます。
協働ロボットの導入規模を迅速に拡大
AMMRクローニングソリューションで展開プロセスを効率化します。TM TCPキャリブレーションキットと組み合わせるだけで、ワークステーションを迅速かつ高精度に複製できます。

自動化がこれまで以上に簡単に
当社の協働ロボットは、多様なタスクのために設計されており、あらゆる規模の運用に適しています。設置、プログラミング、操作が簡単で、容易に規模を拡大縮小できます。 高度技術の専門家により開発されています。当社はお客様の自動化の推進をサポートさせていただきます。