

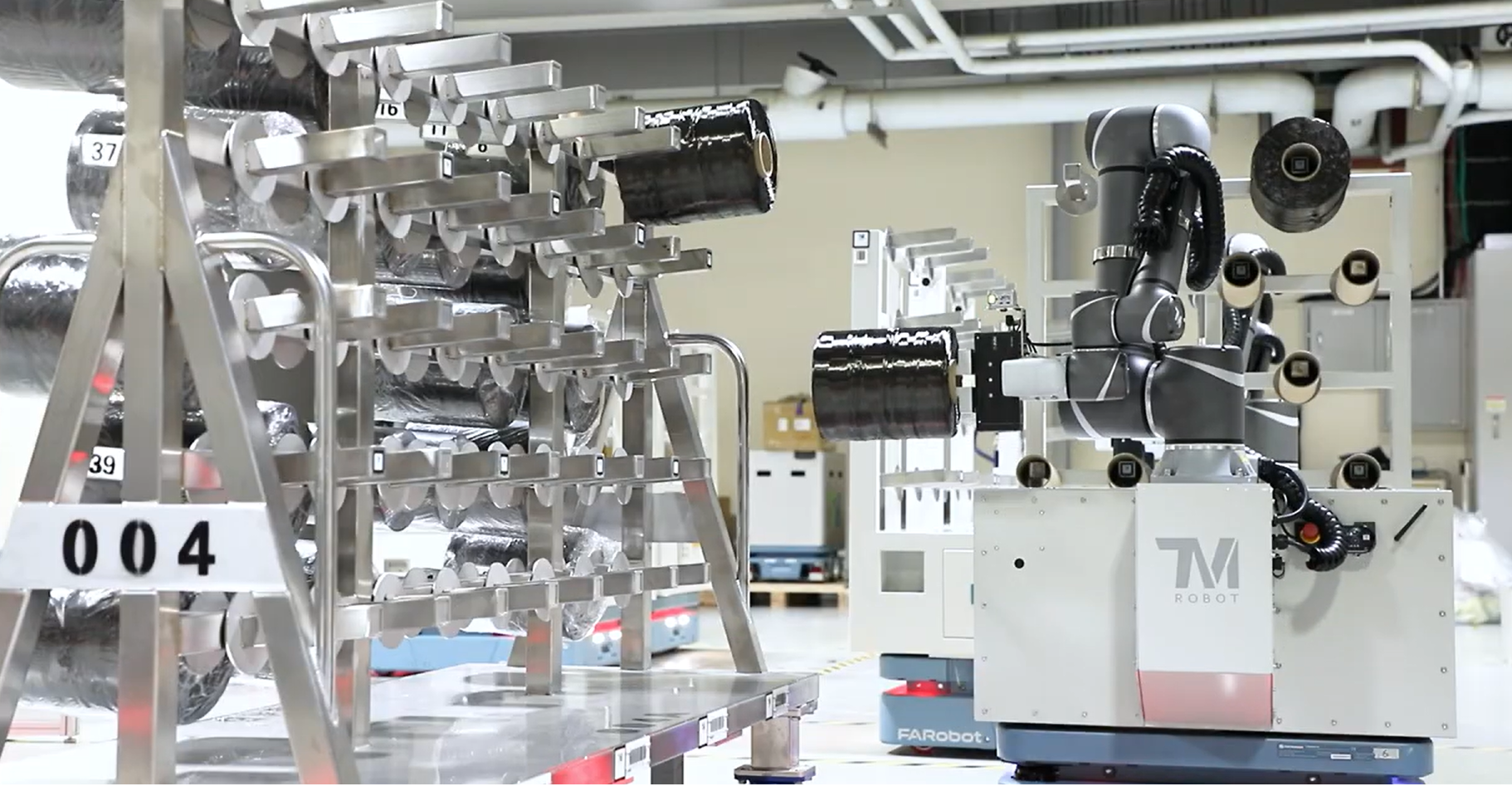
AMMR 클로닝 솔루션 소개
AMMR(자율 모바일 조작 로봇)은 여러 로봇이 동일한 작업을 수행하는 상황에 자주 직면합니다. AMMR 클로닝 솔루션을 사용하면 로봇 프로젝트를 다른 로봇에 빠르고 손쉽게 복제할 수 있어, 동일한 작업에 대해 각 로봇을 수동으로 조정하는 시간을 건너뛸 수 있습니다. 모든 로봇에서 일관된 성능을 달성하고 전체 생산성을 높일 수 있습니다.
수동 조정에서 빠른 배포로
위치 수동 조정 없이 복제 프로세스를 간소화 — 인건비 절감 및 설정 효율성 향상.
이전
생산 라인 자동화에서 여러 로봇을 배포하는 것은 시간과 노동력이 많이 듭니다. 모든 로봇의 이동 지점이 정확히 동일하도록 하려면 각 로봇을 개별적으로 수동 조정해야 합니다.
이후
프로젝트가 복제된 후, 로봇은 지정된 자동 보정 프로세스만 거치면 정확히 동일한 이동 경로를 달성하여 여러 로봇 간의 포인트 이동 오차를 최소화합니다.
로봇 복제 문제 및 해결책
로봇 베이스 고정 시 인적 오류
로봇 베이스 조립 오차로 인해 서로 다른 로봇의 좌표 기준점이 일치하지 않음. 해결책: 시각적 좌표 위치 지정을 도입하여 비전을 사용해 좌표 기준점의 차이를 보정.
말단 장치 제작 및 설치 오류
공구 제작 공차 및 플랜지 설치 시 조립 오차 발생. 해결책: 자동 시각 TCP 보정을 도입하여 공구 끝점의 위치를 획득.
몇 분 만에 새로운 로봇 프로그램 복제
포인트
원본 로봇이 시각적 좌표계에 포인트를 작성합니다.
협동로봇 운용 규모를 빠르게 확장하세요
AMMR 클로닝 솔루션으로 배치 프로세스를 간소화하세요. TM TCP 캘리브레이션 키트와 결합하기만 하면 워크스테이션을 신속하고 정밀하게 복제할 수 있습니다.

그 어느 때보다 쉬운 자동화
당사의 협업 로봇은 다양한 범위의 작업, 그리고 모든 규모의 작업에 적합하도록 설계되었습니다. 이러한 로봇은 간편하게 설치, 프로그래밍, 작업할 수 있고, 손쉽게 확장됩니다. 최고 산업 전문가가 제조한 이 로봇으로 여러분의 자동화 여정을 지원하겠습니다.