Umfassende TM ROS Repositories für nahtlose Integration
Flexibel
Präzise
Effizient
Um eine nahtlose Integration mit ROS zu ermöglichen, bietet Techman Robot eine umfassende Suite von TM ROS-Repositories an, die auf verschiedene TMflow- und ROS-Versionen zugeschnitten sind. Diese Repositories statten Entwickler mit den notwendigen Werkzeugen aus, um ROS-basierte Anwendungen mit dem TM AI Cobot zu erstellen, und ermöglichen eine präzise Bewegungssteuerung sowie eine effiziente Datenerfassung. Unabhängig davon, ob Sie mit unterschiedlichen ROS-Versionen oder spezifischen TMflow-Konfigurationen arbeiten, bieten diese Repositories die Flexibilität und Ressourcen, die für die Erstellung robuster und intelligenter Roboterlösungen erforderlich sind.
Produktübersicht
Techman Robot bietet eine umfassende Suite von TM ROS-Repositories auf GitHub an. Diese Repositories sind sorgfältig organisiert, um mit verschiedenen TMflow- und ROS-Versionen zu korrespondieren, was die Kompatibilität und Benutzerfreundlichkeit für Entwickler gewährleistet.
Zu Ihrer Information entnehmen Sie bitte der folgenden Tabelle eine detaillierte Aufschlüsselung der verfügbaren Repositories:
tmr_ros1
Unterstützte ROS-Versionen
- ROS Melodic Morenia
- ROS Noetic Ninjemys
Unterstützte TMflow-Versionen
- TMflow 1.76 ~ 1.88
tmr_ros2
Unterstützte ROS-Versionen
- ROS 2 Dashing Diademata
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
Unterstützte TMflow-Versionen
- TMflow 1.76 ~ 1.88
tmr2_ros1
Unterstützte ROS-Versionen
- ROS Noetic Ninjemys
Unterstützte TMflow-Versionen
- TMflow 2.14 oder höher
tmr2_ros2
Unterstützte ROS-Versionen
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
Unterstützte TMflow-Versionen
- TMflow 2.14 oder höher
Jedes Repository enthält in der Regel die folgenden Elemente:
TM ROS Driver
Eine Schnittstelle, die es einem ROS Node ermöglicht, Daten vom Roboter zu erfassen und dessen Bewegungen nahtlos zu steuern.
Message Files (msgs)
Wesentliche Dateien, die für die Interaktion mit dem TM ROS Driver erforderlich sind.
Sample Codes
Eine Sammlung von Beispielcodes, die Entwicklern helfen sollen, die Funktionen des TM ROS Drivers schnell zu verstehen und in ihre Projekte zu implementieren.
3D-Modelle(1)
Ein umfassender Satz von 3D-Modellen für TM-Roboter, einschließlich Meshes, URDF- und Xacro-Dateien, die für Visualisierung und Simulation notwendig sind.
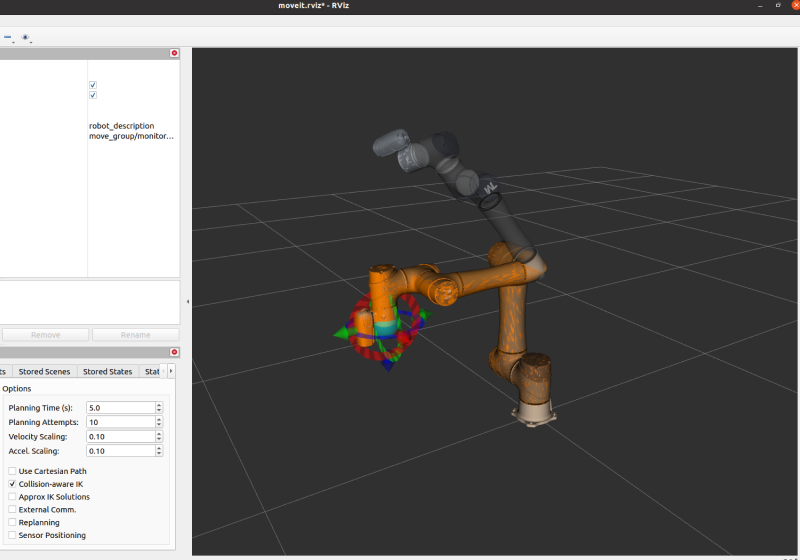
Simulationsdateien(2)
Dateien, die es dem TM AI Cobot ermöglichen, in ROS-Simulatoren wie Gazebo und MoveIt zu funktionieren, was realistische Tests und Entwicklung in einer virtuellen Umgebung erlaubt.
TM ROS Driver
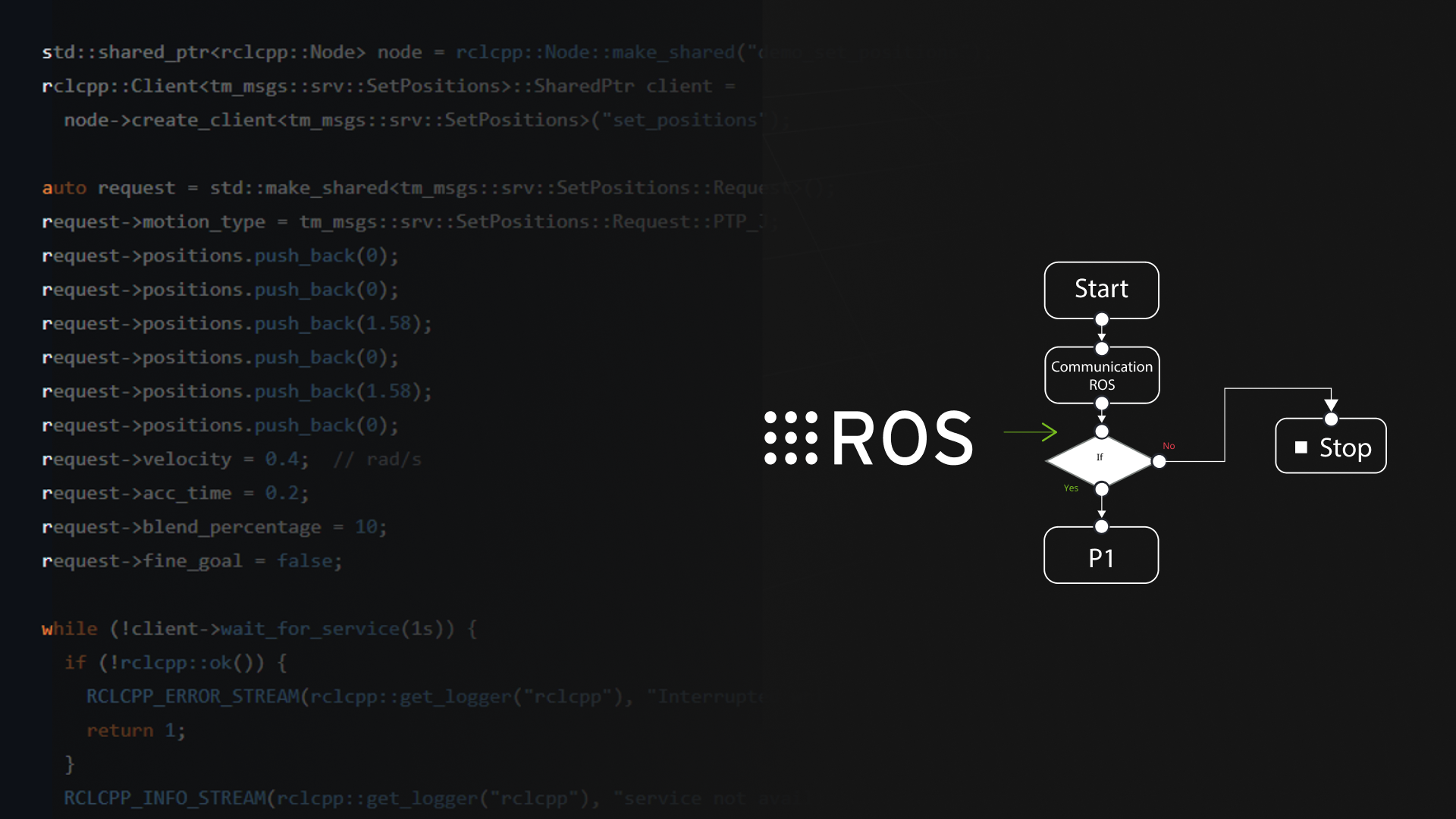
Der TM ROS Driver ist ein Schnittstellenprogramm mit drei Schlüsselkomponenten: Topic Publisher, Service Server und Action Server. Jeder dieser Komponenten spielt eine vitale Rolle bei der Kommunikation und Steuerung zwischen den ROS Nodes der Entwickler und dem Roboter.
01
Topic Publisher
Der Topic Publisher verbindet sich über Ethernet-Slave mit TMflow, sammelt Daten vom Roboter (Roboterstatus, Gelenkstatus, Werkzeugpose, IOs usw.) und veröffentlicht die Daten als ROS Topics. Entwickler (ROS Node) können diese ROS Topics abonnieren und die Daten nutzen.
- Veröffentlicht Feedback-Status auf /feedback_states (inklusive Roboterposition, Fehlercode, IO-Status usw.)
- Veröffentlicht Gelenkstatus auf /joint_states
- Veröffentlicht Werkzeugpose auf /tool_pose
02
Service Server
Der ROS Node des Entwicklers kann Anfragen an diese ROS Services senden, um den Roboter zu steuern.(3)
- /tm_driver/send_script (siehe tm_msgs/srv/SendScript.srv): Sendet Roboterskript (TM Robot Expression) an den Listen Node.
- /tm_driver/set_event (siehe tm_msgs/srv/SetEvent.srv): Sendet Befehle „Stop“, „Pause“ oder „Resume“ an den Listen Node.
- /tm_driver/set_io (siehe tm_msgs/srv/SetIO.srv): Sendet digitale oder analoge Ausgabewerte an den Listen Node.
- /tm_driver/set_position (siehe tm_msgs/srv/SetPosition.srv): Sendet Bewegungsbefehle an den Listen Node. Die Bewegungsarten umfassen PTP, LINE, CIR
03
Action Server
Der Action Server fungiert als Aktionsschnittstelle, die von MoveIt generierte Trajektorien übersetzt und die Roboterbewegung antreibt.
- Eine Aktionsschnittstelle auf /follow_joint_trajectory für die nahtlose Integration mit MoveIt.
Bitte beachten Sie:
- Nicht alle Robotermodelle werden in jedem Repository unterstützt. Diese befinden sich in der Entwicklung und werden gelegentlich hochgeladen. Bitte beziehen Sie sich primär auf die Veröffentlichungen auf der GitHub-Seite von Techman Robot. Bei Fragen oder Bedarf kontaktieren Sie uns bitte.
- Nicht alle TM ROS-Repositories stellen Simulationsdateien bereit. Diese befinden sich in der Entwicklung und werden gelegentlich hochgeladen. Bitte beziehen Sie sich primär auf die Veröffentlichungen auf der GitHub-Seite von Techman Robot. Bei Fragen oder Bedarf kontaktieren Sie uns bitte.
- Für die Bewegungssteuerung durch ROS ist die Ausführung eines Projekts erforderlich, das den Listen Server aktiviert (für/mit Listen Node).
Mehr erfahren
Entdecken Sie unsere Support-Bibliothek und Entwickler-Frameworks, die Ihnen bei der Integration und Anpassung Ihres Systems helfen.
Technische Dokumente
Entdecken Sie unsere vollständige Bibliothek mit technischen Leitfäden und Datenblättern für detaillierte Produktinformationen.
TMcraft
Ein robustes Framework zum Erstellen eingebetteter C#-Plugins und benutzerdefinierter UI-Erweiterungen innerhalb von TMflow.
EIH Camera API
Eine gRPC-Schnittstelle, die präzise Parametersteuerung und Bildzugriff für die Entwicklung eigener Algorithmen mit der eingebetteten Kamera bietet.